
ジャイロスコープ
(ジャイロセンサーから転送)

ジャイロスコープ︵英: gyroscope︶とは、物体の角度︵姿勢︶や角速度あるいは角加速度を検出する計測器ないし装置。ジャイロ、またはジャイロセンサと呼ばれることもある︶。
ジャイロスコープ

ジャイロスコープの動作
船や航空機やロケットの自律航法に使用される。最近ではカーナビゲーションシステムや自動運転システム、慣性航法装置、ロボット、スマートフォン、デジタルカメラ、無人偵察機などでも用いられている。マルチコプターでも活用されており、ラジコン玩具として一般に市販されたものとしては初期のもののひとつであるキーエンスの﹁ジャイロソーサー﹂は、同社の超小型ジャイロを応用した製品であった。ジャイロとはギリシャ語で輪を意味する gyrosである。近年ではMEMSにより小型化が進み、応用分野が広がっている。

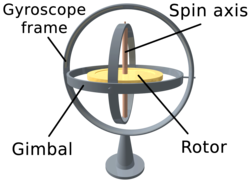
出力軸、入力軸、スピン軸
アニメーション
角(加)速度を検出する方法は大きく2つにわけることができ、
機械力学的な効果を利用する方法として、
●いわゆるジャイロ効果を利用するもの︵回転型︶
●放射方向への振動やガス流に対する﹁見掛けの力﹂であるコリオリ力による影響を利用するもの︵振動型、ガス型︶
光学的な干渉を利用する方法として
●サニャック効果︵光学式︶
がある。
概要[編集]


歴史[編集]
こまを利用するものを発明したのは1817年ドイツのヨハン・ボーネンベルガーで、1832年にウォルター・R・ジョンソンが﹁ロタスコープ (rotascope)﹂と名付けた。1836年、スコットランドの数学者エドワード・サングが地球の自転の検出に使うことを提言した。その後、1852年にフランスのレオン・フーコーが地球の自転を証明しようと実験した際に呼んだ﹁ジャイロスコープ﹂の方が一般に広まったため、フーコーの発明品だとする記述もあるが、彼が発明したのはあくまで﹁名称﹂である。地球の自転の検出の方は製作技術の不足で失敗に終わった。ジャイロスコープが実用に至ったのは後の研究者によるもので、1865年頃の実験器具カタログに記載が見られる。ジャイロスコープのメカニズムに加えて、ジャイロモーメントによって常に一定の方位を示すような仕組みのあるジャイロコンパスができたのは1908年である。 20世紀には、こま以外の各種の方式︵次節︶が発明された。原理[編集]


ジャイロスコープの種類[編集]
ジャイロスコープの種類としては角運動量保存の法則やコリオリの力を利用する機械式と流体式、またサニャック効果を利用する光学式のものがある。機械式[編集]
回転型[編集]
いわゆる﹁こま﹂、フライホイールを用いた方式である。回転する物体はその回転状態を維持する︵慣性の法則、角運動量保存の法則︶。こまの回転面を傾けるような外力が加わると、元の状態を維持しようとするため慣性力が発生する。この回転するこま︵物体︶に加わる慣性力を検出することで、外力によって発生した物体の角速度を検出する。大きな︵重い︶サイズのこまを用いることで、分解能が向上し、安定性も向上させることができる。しかし、この大きさがもっとも重大な欠点ともなる。大きいほど起動時間が長くなり、こまの駆動のための消費電力が大きくなる。また、ベアリングの摩耗などのために定期的なメンテナンスが必要である。最も古くから使われている。 ドライ・チューンド・ジャイロまたはダイナミカリー・チューンド・ジャイロ (DTG) とは、内部の回転体がある高速回転速度に達した時に回転軸への機械的拘束力が極小になる設計としたもので、ジャイロ1個で2軸の角速度検出が行える。 ジャイロ効果とは、この方式が用いている慣性力の効果である。振動型[編集]
詳細は「振動型ジャイロスコープ」を参照
こまのような回転のかわりに棒やリングの振動を用いた方式である。振動する物体に加わるコリオリの力から角速度を検出する。回転型のようなモーターやベアリングなどの複数の部品を必要としないため信頼性が高い。自動車の横滑り防止機構、カメラの手ぶれ補正機構、カーナビゲーション、スマートフォン、ゲーム機などに用いられている。構造上、小型化、大量生産に適しており、MEMSによって搭載される事例が拡大しつつある。
構造の種類
●音叉型
●音片︵横振動細棒、ビーム︶型
●リング型
●プレート型
駆動方式
●静電引力
●逆圧電効果
●電磁力
検出方式
●静電容量型 - 櫛型に並べられた電極間の静電容量を検出する
●圧電型 - 圧電効果によって発生した電荷を検出する
●ピエゾ型 - ピエゾ抵抗効果による抵抗の変化を検知する
●電磁型 - 磁束を横切る回路に発生する誘起起電力によって検出する
●光学式
流体式[編集]
ガス型︵ガスレートジャイロ︶[編集]
流路中に気体︵ガス︶を流すと、その気体に加わるコリオリの力により、気体の流れが変化する。この変化を検出することで角速度を得る。 流れの変化を検出する方法としては構造が簡単な熱線式︵流量計︶が用いられることが多い。 構造が簡単であるが、分解能、安定性ともほかの方式に比べ劣る。 巡航ミサイルのような、使い捨て用途に用いられる。また、ごく初期のカーナビゲーションにも使用された。光学式[編集]
サニャック効果を用いている。高精度の姿勢制御を必要とする場合は、リングレーザジャイロや光ファイバージャイロが使われることが多い。光ファイバージャイロ (fiber optic gyro, FOG)[編集]
詳細は「光ファイバジャイロスコープ」を参照
光ファイバーを巻き、それぞれの端面にレーザー光をスプリットして挿入する。巻いた面と垂直な軸方向を中心に角速度が加わると、相対論的効果により、分離された光に光路差が生じる︵サニャック効果︶。この光路差により分離された二つの光の間に位相差が生じる。この位相差を検出することにより、角速度を得る。
光ファイバーの長さと巻き半径などにより性能が決まる。使用する光ファイバーは通信用ではなくジャイロ専用である。
レーザー発光素子の寿命、発光素子とファイバーの接点劣化、温度変化に敏感であること、リングレーザージャイロよりも低精度であることが欠点ではあるが、小型であるため用いられることが増えている。温度制御を行うことで性能︵安定性︶の向上が図れる。
リングレーザージャイロ (ring laser gyro, RLG)[編集]
詳細は「リングレーザージャイロ」を参照
複数のミラーによってリング状(実際には多角形状)の光路をもつレーザー共振器を構成し、回転が加わったときに生じるサニャック効果を用いて、角速度を検出する。非常に精度が高く、高性能な航空機やロケットの姿勢制御用にはこのジャイロが使われている。
量子式 (Quantum gyroscope)[編集]
量子力学の原理に基づく
量子ジャイロスコープ[編集]
詳細は「量子ジャイロスコープ」を参照
量子力学の原理に基づいた非常に高感度の角速度計測装置で理論的には地球の自転の回転速度の分︵1度の60分の1︶単位での変化なども検出できる。