資料アーカイブ 20120821版
- WEB版
- PDF版(1スライド/1ページ) (2012/08/21, 2,974,832 bytes)
PDF版(4スライド/1ページ) (2012/08/21, 1,709,198 bytes)
PDF版(8スライド/1ページ) (2012/08/21, 1,288,673 bytes)
内容紹介
 |
 |
今回の題材は、マイコンおよびパソコン(サーバ等)の周辺の通信技術です。
※Windows, MacOS, Linux等の高等なOSを搭載しているコンピュータをパソコンで代表しています。
コンピュータを扱う上で、通信のハード、ソフトは欠かせないものになりました。
メカトロ関係で通信が使われるのは、主に、
●目的の場所付近に置いたマイコンでセンシング、ある程度の処理をした上で、メインのコンピュータに伝える。
●規模の大きなシステムの分散化を図るため、局所を制御する多数のマイコンを通信で接続する。
という箇所です。
通信を理解するためには、ハードとソフトの両面を知る必要があります。もちろん、分担することはあると思いますが、特に、通信のソフトを扱う場合は、ハード面を知っておく意義があります。
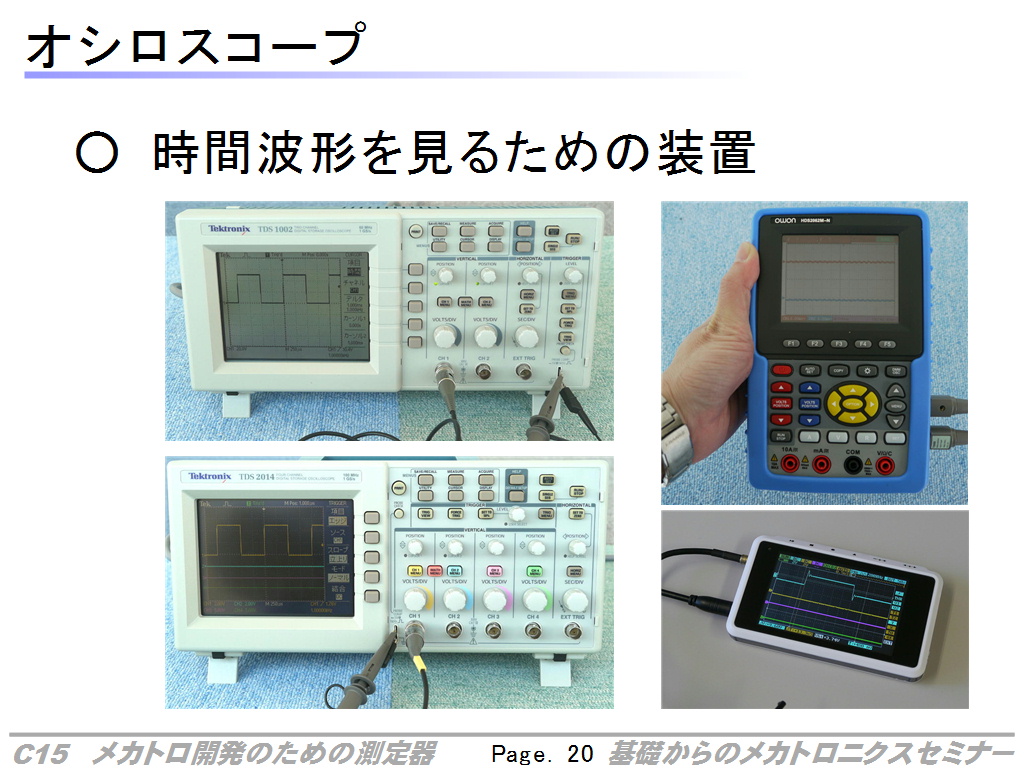
他の多くの技術同様、﹁この手順をすれば、あとはOSなどが勝手に通信してくれる﹂という層化と、下層の隠蔽は行われますが、ひとたび、トラブルが発生した場合には、とくにマイコン関係の場合には、直接通信ラインの状況を調べることが近道になる場合があります(私は通信が成立しないときなどは、真っ先にオシロを引っ張り出します)。
さて、通信にはさまざまな方式がありますが、典型的には以下のようなものが見られます。
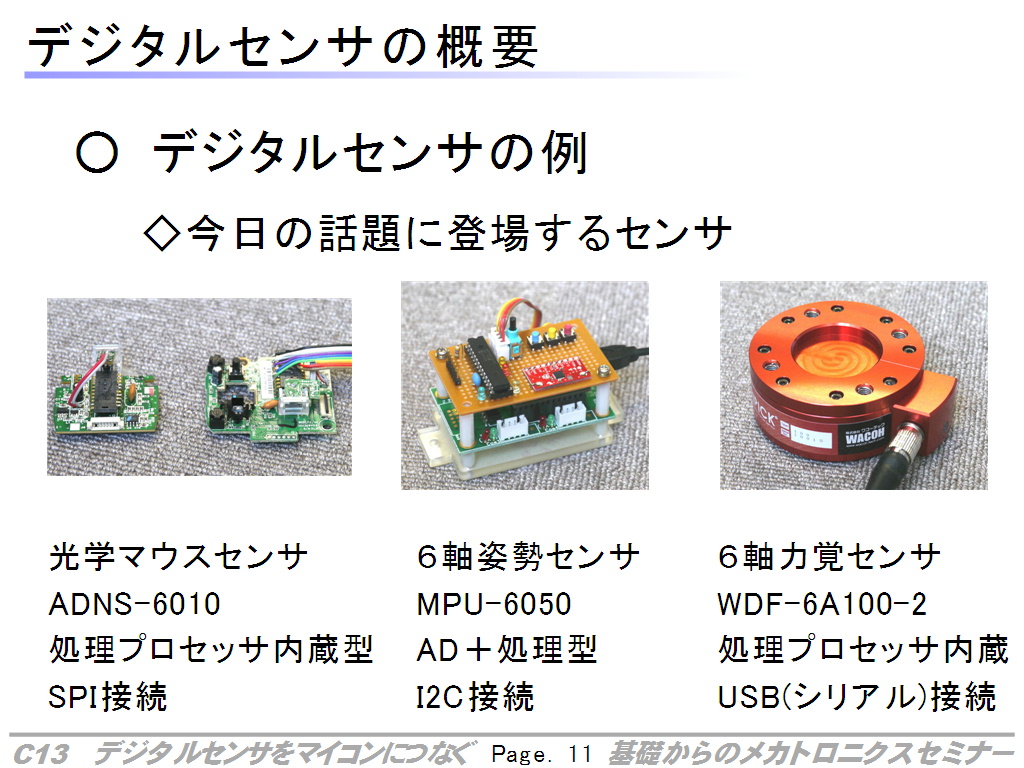
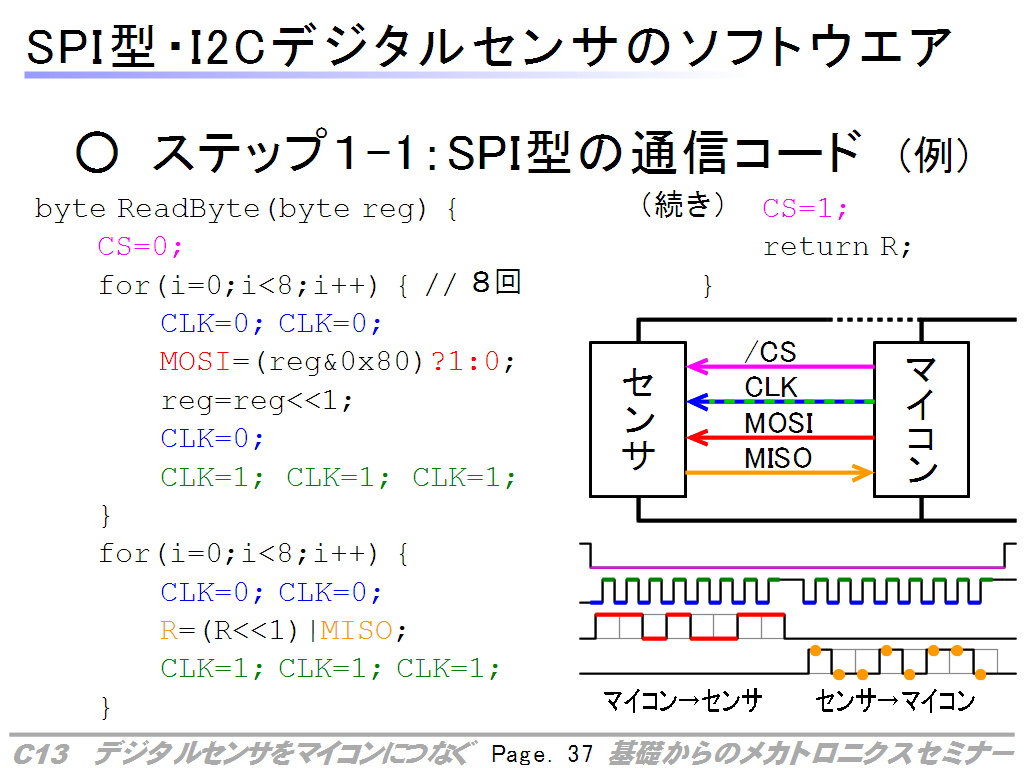
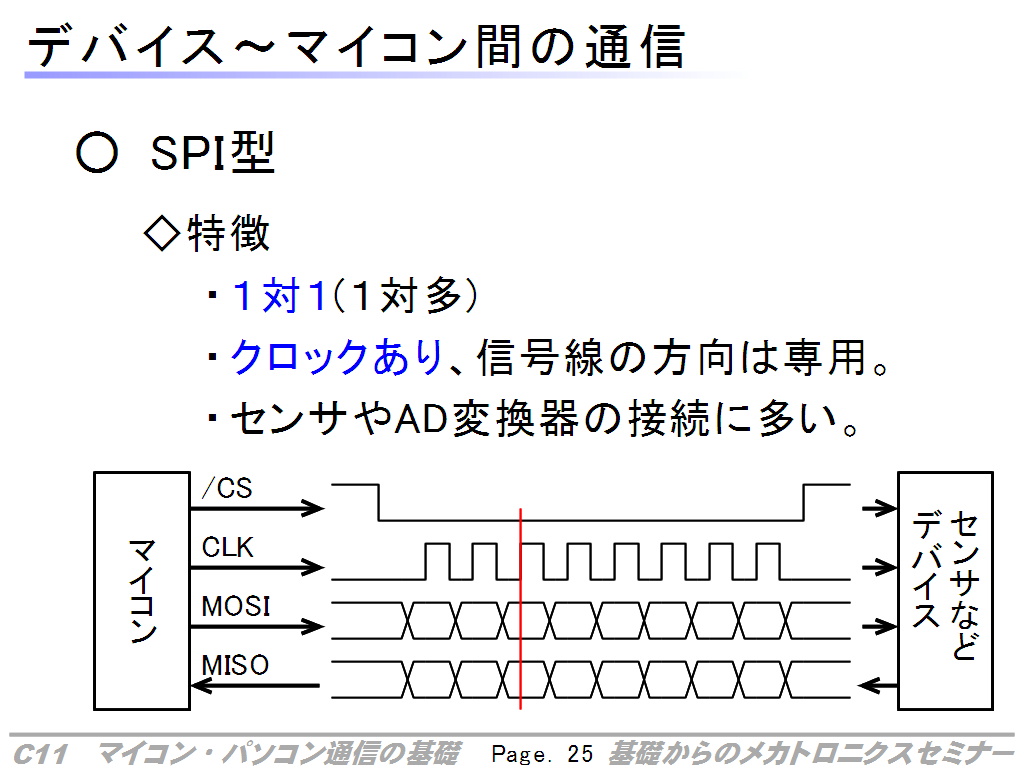
●センサ等デバイス、AD変換IC~マイコン‥SPIやI2C
●マイコン~マイコン間‥調歩同期シリアル、I2C、CAN
●マイコン~パソコン間‥調歩同期シリアル、CAN、Ethernet
●パソコン間‥Ethernet
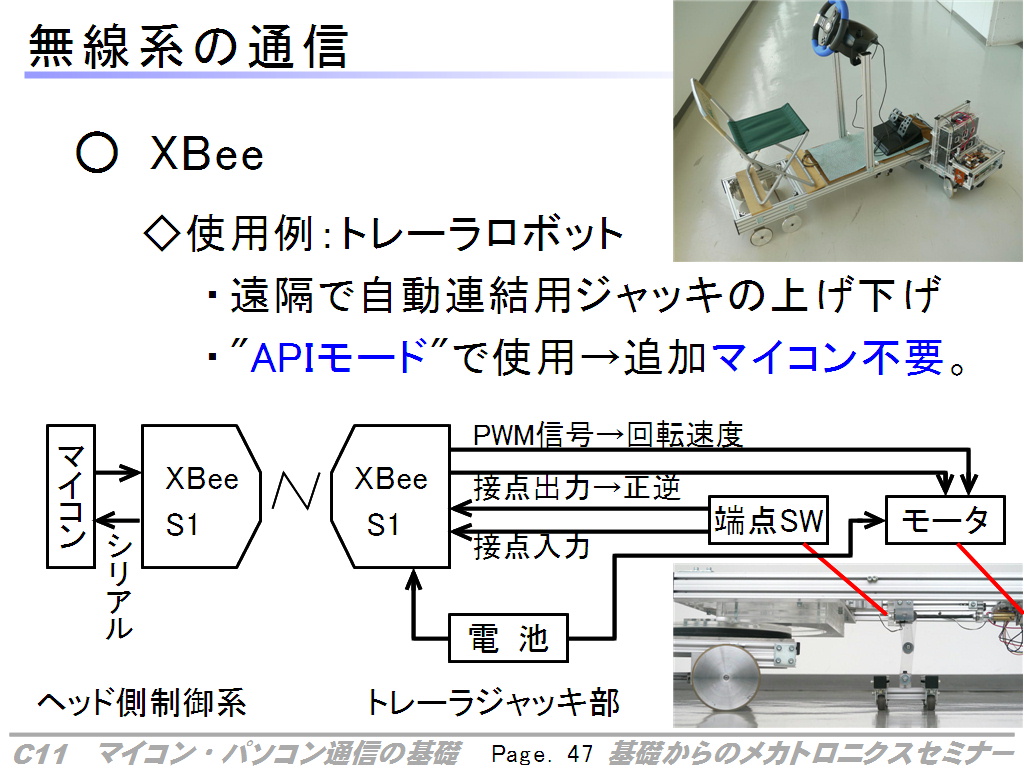
そのほか、無線系では、Zigbee, XBee, Bluetooth, 無線LANなども用いられています。
これらはそれぞれ、クロックの有無や、専用回路の必要性の有無、1対1通信か多対多かなどで特徴を持ち、それぞれの用途ごとにポピュラーに使われるようになってきました。
逆に、これらを知ることで、典型的なパターンを知ることができるでしょう。
今回のセミナでは、これらの通信方式を広く浅く簡単に解説しました。
また、多少レベルの高いところとして、ネットの通信で多用されているTCP/IP通信、HTTP,SMTPなどのプロトコルの概要なども紹介しました。