写像
2つの集合の要素の間の対応
この項目は内容が専門的であり、一般の閲覧者にはわかりにくくなっているおそれがあります。 |
写像︵しゃぞう、英: mapping, map︶は、二つの集合が与えられたときに、一方の集合の各元に対し、他方の集合のただひとつの元を指定して結びつける対応のことである。関数、変換、作用素、射などが写像の同義語として用いられる[1][2]こともある。
ブルバキに見られるように、写像は集合とともに現代数学の基礎となる道具の一つである。現代的な立場では、﹁写像﹂と︵一価の︶﹁関数﹂は論理的におなじ概念を表すものと理解されているが、歴史的には﹁関数﹂の語は解析学に出自を持つものであり、一部には必ずしも写像でないものも関数の名の下におなじ範疇に扱われる︵多価関数参照︶。文献によっては﹁数の集合︵大抵の場合実数体 Rまたは複素数体 Cの部分集合︶を終域に持つ写像﹂をして特に﹁関数﹂と呼び、﹁写像﹂はより一般の場合に用いる[3][4]。関数、二項関係、対応の各項も参照のこと。
定義
編集素朴な説明
編集「関数 (数学)」も参照
集合 Aの各元に対してそれぞれ集合 Bの元をただひとつずつ指定するような規則 fが与えられているとき、f を﹁定義域︵あるいは始域︶ Aから終域 Bへの写像﹂といい
 などと表す。また fは Aで︵あるいは Aの上で︶定義されているといい、あるいはまた fは Bに︵あるいは Bの中に︶値を持つという。始域 Aを sour(f)、終域 Bを tar(f) のように記すこともある。また、A の元 aに対して fによって指定される Bの元が bである︵このことを、a が fによって bに写されるという︶とき、b を aにおける fの像あるいは値︵あたい、value︶と呼び、b を f(a) で表す。 fによって Aの元 aが Bの元 f(a) に写されることは、
a ↦ f(a)
という記法で表される[5]。変数 xを用いて x↦ f(x) のように写像を表すとき、f は、 Aをわたる︵または動く︶変数 xの関数である、あるいは変数 xに従属するという[要出典]。
などと表す。また fは Aで︵あるいは Aの上で︶定義されているといい、あるいはまた fは Bに︵あるいは Bの中に︶値を持つという。始域 Aを sour(f)、終域 Bを tar(f) のように記すこともある。また、A の元 aに対して fによって指定される Bの元が bである︵このことを、a が fによって bに写されるという︶とき、b を aにおける fの像あるいは値︵あたい、value︶と呼び、b を f(a) で表す。 fによって Aの元 aが Bの元 f(a) に写されることは、
a ↦ f(a)
という記法で表される[5]。変数 xを用いて x↦ f(x) のように写像を表すとき、f は、 Aをわたる︵または動く︶変数 xの関数である、あるいは変数 xに従属するという[要出典]。
などと表す。また fは Aで︵あるいは Aの上で︶定義されているといい、あるいはまた fは Bに︵あるいは Bの中に︶値を持つという。始域 Aを sour(f)、終域 Bを tar(f) のように記すこともある。また、A の元 aに対して fによって指定される Bの元が bである︵このことを、a が fによって bに写されるという︶とき、b を aにおける fの像あるいは値︵あたい、value︶と呼び、b を f(a) で表す。 fによって Aの元 aが Bの元 f(a) に写されることは、
a ↦ f(a)
という記法で表される[5]。変数 xを用いて x↦ f(x) のように写像を表すとき、f は、 Aをわたる︵または動く︶変数 xの関数である、あるいは変数 xに従属するという[要出典]。
相等関係
編集2つの写像 f : A→B、 g : A→B の相等関係について、次が成り立つ:
f = g ⇔ ∀a∈A ( f(a) = g(a) )[6]。
関係の一種として定義する場合
編集「二項関係」も参照
集合論においては、集合 A, Bの元の順序対からなる集合︵すなわち二項関係︶f が
●x ∈ Aならば (x, y) ∈ fを満たす y∈ Bが存在する
●(x, y1) ∈ fかつ (x, y2) ∈ fならば y1= y2
の二つをみたすとき、f を Aから Bへの関数と呼び[7]、f: A→ Bで表す。またこのとき、(x, y) ∈ fであることを f(x) = yと書く。この文脈では、f と fのグラフ {(x, y) | y= f(x)} を同一視し、関数と写像を同じ意味に用いる。
二つの写像 fと gの相等は、集合として同一であるということ、すなわち
∀x∀y ( (x,y) ∈ f⇔ (x,y) ∈ g)
ということであるが、これは︵ fと gの定義域が等しく、かつ︶任意の a∈ Aに対して f(a) = g(a) であることと同値である。
3つの集合からなる組の一種として定義する場合
編集
一方、圏論の用語との整合性を重んじる文脈では、次のようになる。
集合 A, Bの元の順序対からなる集合︵すなわち二項関係︶Gf が
●全域性: x∈ Aならば (x, y) ∈ Gfを満たす y∈ Bが存在する
●右一意または関数的: (x, y1) ∈ Gfかつ (x, y2) ∈ Gfならば y1= y2
の二つをみたすとき、三つ組 f := (A, B, Gf) をこの関数関係 Gfから定まる Aから Bへの写像と呼び、f: A→ Bで表す。またこのとき、(x, y) ∈ Gfであることを f(x) = yと書き、Gf = {(x, y) | y= f(x)} を写像 fのグラフと呼ぶ。二つの写像 (A, B, Gf) と (C, D, Gg) の相等は、三つ組としての相等をいう。特に、f, gがともに Aから Bへの写像のとき、f と gが等しいというのは、この二つの写像のグラフGf と Ggとが A× Bの集合として同一であるということ、すなわち
∀x∀y ( (x,y) ∈ Gf⇔ (x,y) ∈ Gg)
ということであるが、これは任意の a∈ Aに対して f(a) = g(a) であることと同値なので、素朴な意味で写像 fと gが等しいと言ったときと同じ意味となる。
圏論の用語と整合性をとる文脈では、写像の相等を扱う際の、二つの写像が﹁ともに Aから Bへの﹂写像であるという但し書きは重要である。例えば Aから Bへの写像 fと Aから B⊆ B′ なる B′ への写像 gについて、集合として f= g︵つまりグラフが一致︶でも三つ組としては異なるから、この二つの写像は同一でない。実際、x ↦ x2なる元の対応で定められる二つの写像 f: R→ Rと g: R→ R≥0 を考えると後者は全射性を持つが前者はそうでない[8]︵値域・終域の各項も参照︶。
また、超限帰納法を用いるなどして写像を集合論的に構成する場合、始域や終域としては﹁すべての集合﹂のような真の類を考えることもある[要出典]。そのような場合でも定義域 Aを集合に制限すれば順序対の集まり f|A や値域 f(A) も集合となる[要出典]。
例
編集自明な写像
編集
●集合 Aの任意の元 aに対して a自身を対応させると、これは Aから Aへの写像になる。この写像を恒等写像といい、IA や idAや 1Aなどで表す。
●B を Aの部分集合とするとき、B の任意の元 bに対して b自身を Aの元として対応させる Bから Aへの写像を包含写像といい、iA, Bや incA, Bなどで表す。
●f: A→ Bとする。A の部分集合 A′ について、A′ の各元 aに対して Bの元 f(a) を対応させると、これは A′ から Bへの写像になる。この写像を fの A′ への制限写像といい、f|A′ と表す。
●A が空集合のとき、A から Bへの写像はただ一つ存在し、これを空写像と呼ぶ。空写像に対応するグラフは空集合である。A の元が存在しないので何の対応も定めてはいないが、これも立派な写像である。素朴な定義では、f が写像であるとは﹁a が Aの元ならば Bの元 f(a) がただ一つ定まる﹂が成り立つことであったが、A が空集合ならば﹁a が Aの元﹂は偽であるから、この命題は真である。この議論は Aと Bが共に空集合である場合も通用するので、空集合から空集合への写像は空写像ただ一つである[注釈1]。
一般の例
編集
●x ∈ Rに 絶対値 |x| を対応させる |・|: R→ [0, ∞) は写像である。これは全射であるが単射ではない。
●GL(n, R) を n次実一般線型群、即ち正則な実 n次正方行列の全体とする。行列 A∈ GL(n, R) にその行列式  を対応させる対応 det: GL(n, R) → R× は写像になる。これも全射であるが n≥ 2 のとき単射ではない。
●R2[x] を {ax2 + bx+ c | a, b, c∈ R, a≠ 0} ︵実係数2次多項式全体︶で定める。多項式 ax2+ bx+ c∈ R2[x] にその判別式 D= b2− 4ac ∈ Rを対応させる対応 D: R2[x] → Rは写像である。これも全射であるが単射ではない。
●
を対応させる対応 det: GL(n, R) → R× は写像になる。これも全射であるが n≥ 2 のとき単射ではない。
●R2[x] を {ax2 + bx+ c | a, b, c∈ R, a≠ 0} ︵実係数2次多項式全体︶で定める。多項式 ax2+ bx+ c∈ R2[x] にその判別式 D= b2− 4ac ∈ Rを対応させる対応 D: R2[x] → Rは写像である。これも全射であるが単射ではない。
● に
に  ︵
︵ 以下の最大の整数︶を対応させる対応
以下の最大の整数︶を対応させる対応  は床関数といわれる。同様に、
は床関数といわれる。同様に、 ︵ 以上の最小の整数︶を対応させる対応
︵ 以上の最小の整数︶を対応させる対応  は天井関数といわれる。どちらも、全射であるが単射ではない。
●
は天井関数といわれる。どちらも、全射であるが単射ではない。
● に実部, 虚部を対応させる写像
に実部, 虚部を対応させる写像  ,
,  はともに全射であるが単射でない.
●n 個の空でない集合 X1,...,Xn の直積集合
はともに全射であるが単射でない.
●n 個の空でない集合 X1,...,Xn の直積集合  から Xiへの写像 piを次のように定める:
から Xiへの写像 piを次のように定める:  これは から Xiへの第
これは から Xiへの第  射影︵ -th projection︶といわれる. これは全射であるが単射でない.
射影︵ -th projection︶といわれる. これは全射であるが単射でない.
を対応させる対応 det: GL(n, R) → R× は写像になる。これも全射であるが n≥ 2 のとき単射ではない。
●R2[x] を {ax2 + bx+ c | a, b, c∈ R, a≠ 0} ︵実係数2次多項式全体︶で定める。多項式 ax2+ bx+ c∈ R2[x] にその判別式 D= b2− 4ac ∈ Rを対応させる対応 D: R2[x] → Rは写像である。これも全射であるが単射ではない。
● に ︵ 以下の最大の整数︶を対応させる対応 は床関数といわれる。同様に、 ︵ 以上の最小の整数︶を対応させる対応 は天井関数といわれる。どちらも、全射であるが単射ではない。
● に実部, 虚部を対応させる写像 , はともに全射であるが単射でない.
●n 個の空でない集合 X1,...,Xn の直積集合 から Xiへの写像 piを次のように定める: これは から Xiへの第 射影︵ -th projection︶といわれる. これは全射であるが単射でない.
各分野で代表的な写像
編集など。これらはどれも、圏論における射の例になっている。(#射・関手)
定値写像
編集基本概念
編集像・逆像
編集
B′ を Bの部分集合とするとき、f によって B′ に写される始域 Aの元全体からなる集合 {a ∈ A | f(a) ∈ B′} を B′ の逆像または原像といい、f−1(B′) で表す[注釈2]。
A の部分集合 Xの元の fによる像たちの全体からなる終域 Bの部分集合 {f(a) | a∈ X} を Xの fによる像といい、f[X], f″X などで表す。特に fの Aによる像 f[A] を fの値域 (range) と呼び、ran(f), Im(f) などで表す[注釈3]。つまり、写像 f: A→ Bあるいは Gf⊆ A× Bの値域 ran(f) は
 で定義される。
で定義される。
で定義される。
合成
編集詳細は「写像の合成」を参照
2つの写像 f : A→B、 g : B→C が与えられたとする。そのとき、 Aの元 aに Cの元 g(f(a)) を対応させる Aから Cへの写像が1つ得られる[9]。その写像を fと gとの合成写像︵あるいは積︶といい、 g∘f︵または gf︶で表す‥
g∘f : A→C、 ∀a∈A ( (g∘f)(a) = g(f(a)) )[9]。
写像 f : A→B、 g : B→C、 h : C→D が与えられたとき、
●(h∘g)∘f = h∘(g∘f) ︵結合律︶、
●f∘IA = f、 IB∘f = f
が成り立つ[10]。︵なお、写像の合成について交換律は成り立たない[11]︶これらのことから、特に Aからそれ自身への写像︵A 上の変換︶全体の集合は恒等写像を単位元とする非可換モノイドをなすことがわかる。
全射・単射および逆写像
編集


詳細は「全射・単射・全単射」を参照
全射・単射・全単射
編集
右全域性﹁f: A→ Bについて ran(f) = B﹂が成り立つとき︵つまり値域と終域が一致するとき︶、f を Aから Bへの全射という。
左一意性﹁A の任意の元 a1, a2に対して、a1 ≠ a2ならば f(a1) ≠ f(a2)﹂が成り立つとき、 fを単射という。包含写像は単射である。単射の制限写像も単射である。
A から Bへの全射 fがさらに単射でもあるとき、f は Aから Bへの全単射であると言われる。定義域を Aとする任意の単射 fはあきらかにその値域 f(A) への全単射である。
逆写像
編集
f を Aから Bへの全単射とする。そのとき、 Bの元 bに対して、 f(a) = bであるような Aの元 aがちょうど1つ存在する。そこで、 Bの元 bにそのような Aの元 aを対応させる Bから Aへの写像を fの逆写像といい、f−1 と表す。定義より次が成り立つ‥
f−1 : B→A、 ∀a∈A ∀b∈B ( f−1(b) = a⇔ f(a) = b)[9]。
f−1は Bから Aへの全単射である。f−1 の構成から、
 であることが分かる。
であることが分かる。
であることが分かる。
関連概念および定理
編集
A からそれ自身への全単射全体の集合を S(A) とすると、写像の合成は結合法則を満たし、恒等写像を単位元として、任意の全単射が逆写像を逆元に持つから、これは群をなす。特に Aが n個の元からなる有限集合の場合の S(A) を n次対称群という。
f: A→ B, g: C→ Dの合成 g∘ f: A→ Dが定義可能で全単射であるとき、g が全射であることおよび fが単射であることが容易に確かめられるが、このことの逆も次の意味で成り立つ。
●f: A→ Bが全射であるとき、︵選択公理を仮定すると︶B から Aへの写像 rが存在して右可逆性 f∘ r= idB が成り立つ。この rのことを、f の右逆写像という。
●f: A→ B︵A ≠ ∅︶が単射であるとき、B から Aへの写像 lが存在して左可逆性 l∘ f= idA が成り立つ。この lのことを、f の左逆写像という。
この二つの事実には、正確に逆が成り立つ。従って、全射と単射を次のように定義することもできる‥
- 写像 f が右逆写像を持つとき、f を全射といい、f が左逆写像を持つとき、f を単射という。
写像の構成法
編集既知の写像から別の新たな写像を構成する方法をいくつか示す。
制限と延長
編集詳細は「制限 (数学)」を参照
写像の定義域をより小さな部分集合に取り換えることで写像の制限 (restriction) または縮小[11]が定義される。すなわち、写像 f: X→ Yと部分集合 S⊆ Xが任意に与えられたとき、任意の s∈ Sに対して f|S(s) := f(s) と置くことにより定義される写像 f|S: S→ Yを写像 fの Sへの︵定義域の︶制限と呼ぶ。写像 hの適当な制限が fに一致するとき、h は fの延長 (continuation) または拡大[12]もしくは拡張 (extension) であるという。終域の制限や延長を考えることもある。また写像の制限の記号は誤解のおそれが無い限り省略されることも多い。
直和
編集詳細は「区分的に定義された写像」を参照
ふたつの写像 f: X→ Y, g: W→ Yで、それらの定義域が交わりを持たない (X ∩ W = ∅) とき、これらのグラフの合併として写像の直和 f ⊕ g: X ∪ W → Yを定義する。これは具体的に
 と書ける区分的に定義された写像である。より一般に、X ∩ W ≠ ∅ のとき、二つの写像の X ∩ W への制限が f|X∩W = g|X∩W を満たすとき、直和写像 f ⊕ g は well-defined で、
と書ける区分的に定義された写像である。より一般に、X ∩ W ≠ ∅ のとき、二つの写像の X ∩ W への制限が f|X∩W = g|X∩W を満たすとき、直和写像 f ⊕ g は well-defined で、
 を満たす。直和 f ⊕ g は f, gの共通の延長として最小であり、直和のグラフはそれぞれの写像のグラフの合併である。直和は可換である。
さらに一般の場合に、f: X→ Yの g: W→ Yによる上書き和 (override union) と呼ばれる gの延長 f ⊕ g: X ∪ W → Yが gおよび f|X∖W のグラフの合併として与えられ、
を満たす。直和 f ⊕ g は f, gの共通の延長として最小であり、直和のグラフはそれぞれの写像のグラフの合併である。直和は可換である。
さらに一般の場合に、f: X→ Yの g: W→ Yによる上書き和 (override union) と呼ばれる gの延長 f ⊕ g: X ∪ W → Yが gおよび f|X∖W のグラフの合併として与えられ、
 と書ける。上書き和は一般には可換でない。
と書ける。上書き和は一般には可換でない。
と書ける区分的に定義された写像である。より一般に、X ∩ W ≠ ∅ のとき、二つの写像の X ∩ W への制限が f|X∩W = g|X∩W を満たすとき、直和写像 f ⊕ g は well-defined で、
を満たす。直和 f ⊕ g は f, gの共通の延長として最小であり、直和のグラフはそれぞれの写像のグラフの合併である。直和は可換である。
さらに一般の場合に、f: X→ Yの g: W→ Yによる上書き和 (override union) と呼ばれる gの延長 f ⊕ g: X ∪ W → Yが gおよび f|X∖W のグラフの合併として与えられ、
と書ける。上書き和は一般には可換でない。
直積
編集ふたつの写像 f: X → Z, g: Y → W に対して、写像の直積 f × g: X × Y → Z × W は

で与えられる。
商と標準分解
編集


写像の集合
編集詳細は「配置集合」を参照
![{\displaystyle [X\to Y],\ {\mathcal {F}}(X,Y),\ \operatorname {Map} (X,Y)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f104725cac9e413a3e5e18fa5e5410ad5cbb76a3)
![{\displaystyle f\mapsto g\quad (C\ni f(a,b)=g(a)(b);\;g:A\to [B\to C])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/de8238de8fab24981d8cc4cc82341e0bf1fe3d47)
写像図式
編集詳細は「可換図式」を参照
複数の集合と写像を一度に扱う必要があるとき、図式や系列と呼ばれる道具を用いると記述が簡素になる。ホモロジー代数や圏論の文脈ではよく用いられる。写像の図式[18]とは、いくつかの集合を頂点とし、それらの集合間の写像を有向辺にもつようなグラフである。簡単な図式の例としては鎖  や
や
や
-
 写像の合成: 可換三角形
写像の合成: 可換三角形 -
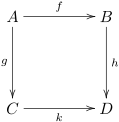 可換矩形
可換矩形


一般化と応用
編集部分写像
編集詳細は「部分写像」を参照
一般には、定義域と始域が異なる︵値の定められていない始域の元が存在する︶という場合も考え得る。集合 A, Bの元の順序対からなる集合︵すなわち二項関係︶Gf が
●右一意性: (x, y1) ∈ Gfかつ (x, y2) ∈ Gfならば y1= y2
をみたすとき Gfは Aから Bへの関数関係であると言われる。このとき、三つ組 f := (A, B, Gf) をこの関数関係 Gfから定まる Aから Bへの部分写像と呼び[注釈4]、f: A→ Bで表す。部分写像 f: A→ Bすなわち Gf⊆ A× Bの定義域 dom(f) と値域 ran(f) は次のように定義される‥
 写像の定義の際には課した関係の全域性は、部分写像 fの定義域 dom(f) が始域 Aに一致することをいうものであり、全域的な部分写像を特に全域写像 (total mapping) と呼ぶ。すなわち、全域写像は写像の同義語である[注釈5]。
写像の定義の際には課した関係の全域性は、部分写像 fの定義域 dom(f) が始域 Aに一致することをいうものであり、全域的な部分写像を特に全域写像 (total mapping) と呼ぶ。すなわち、全域写像は写像の同義語である[注釈5]。
写像の定義の際には課した関係の全域性は、部分写像 fの定義域 dom(f) が始域 Aに一致することをいうものであり、全域的な部分写像を特に全域写像 (total mapping) と呼ぶ。すなわち、全域写像は写像の同義語である[注釈5]。
多変数・多価の写像
編集
写像の多変数化による一般化を考えると、それは始域を何らかの直積集合に取り換えた通常の意味の写像として扱える。とくに一つの集合 Mに対して M× M×…× M→ Mなる形の多変数写像は Mの複数の元から別の新しい元を作り出す操作と見做して算法と呼ばれる[20]。
多値の関数の場合も終域を直積集合に取り換えた写像として定式化することができる場合もあり、例えばベクトル値関数 はスカラー値関数の直積として理解できる。しかし単純にそのように捉えることができない場合、あるいは捉えないほうがよい場合もある。例えば多価の複素解析関数は、分岐切断を超えてそれぞれの分枝の間に素性の良い関係性を記述することができ、適当なリーマン面上で定義された通常の関数と考えることが有効である。
射・関手
編集脚注
編集注釈
編集
(一)^ この事実は0の0乗を1と定義する理由の一つに挙げられる︵ただし、いつもそのように定義するわけではない︶
(二)^ ここに、f−1 は単なる符牒であって必ずしも写像を定義しないが、対応と考えることができるし、写像 fが逆を持てばそれに一致する。
(三)^ 部分写像を写像と呼ぶ立場と同様に、やはり値域と終域を明示的に区別しない立場もある。またこの立場では値域と終域とを区別せずにコドメイン (codomain) あるいはターゲット (target) と呼ぶこともある。
(四)^ 全域的でないものに限って部分写像と言っている場合もある。
(五)^ 部分写像と全域写像を総称して写像と呼ぶ流儀もある。これは、定義域と始域の区別を重視しない立場であるということもでき、この立場で始域や定義域を区別せずにドメイン (domain)あるいはソース(source)と呼ぶこともある。
出典
編集
(一)^ 例えば(ケリー 1968, p. 10)は﹁関数,対応,写像,作用素をすべて同じ意味で使用することにする﹂という断り書きをつけている。
(二)^ The words mapormapping, transformation, correspondence, and operator are often used synonymously. (Halmos 1970, p. 30). (訳文: 写像、変換、対応および作用素の語がしばしば (関数の) 同義語として用いられる)
(三)^ 例えば Lang 1971, p. 83, 松坂 1968, p. 28, PlanetMath など
(四)^ 松本 (1988) は、多様体上の実数値写像を関数と呼んでいる。
(五)^ 松坂 1968, p. 298.
(六)^ 松坂 1968, p. 24, 37, 38.
(七)^ Kunen 1980, p. 14
(八)^ 松本 (2004), 注意 1.1.6, 定義 1.1.7 なども参照
(九)^ abc松坂 1968, p. 34.
(十)^ 松坂 1968, p. 35, 定理 6.
(11)^ ab松坂 1968, p. 36.
(12)^ 松坂 1968, p. 37.
(13)^ 松坂 1968, p. 55.
(14)^ ab松坂 1968, p. 59.
(15)^ 松坂 1968, p. 38.
(16)^ Dauben (1990), Georg Cantor, p. 174
(17)^ Dauben (1990), Georg Cantor, p. 174
(18)^ 松坂 1968, p. 296.
(19)^ 松坂 1968, p. 297.
(20)^ 松坂 1968, p. 50.
参考文献
編集
●ニコラ・ブルバキ 著、前原昭二 訳﹃集合論 要約﹄︿数学原論﹀1968年。
●Halmos, Paul R. (1970). Naive Set Theory. Springer-Verlag. ISBN 0-387-90092-6
●ジョン L. ケリ- 著、児玉之宏 訳﹃位相空間論﹄吉岡書店、1968年。
●Kunen, Kenneth (1980). Set Theory An Introduction to Independence Proofs. North-Holland. ISBN 0-444-86839-9
●Lang, Serge (1971), Linear Algebra (2nd ed.), Addison-Wesley
●松本, 幸夫﹃多様体の基礎﹄東京大学出版会︿基礎数学5﹀、1988年。ISBN 978-4-13-062103-8。
●松坂和夫﹃集合・位相入門﹄岩波書店、1968年。ISBN 4-00-005424-4。