出典: フリー百科事典『ウィキペディア(Wikipedia)』
| この記事は検証可能な参考文献や出典が全く示されていないか、不十分です。出典を追加して記事の信頼性向上にご協力ください。(このテンプレートの使い方)
出典検索?: "変位" – ニュース · 書籍 · スカラー · CiNii · J-STAGE · NDL · dlib.jp · ジャパンサーチ · TWL(2011年10月) |
| 古典力学
|

運動の第2法則
|
| 歴史(英語版)
|
|
|
|
|
変位︵へんい、英語: displacement︶とは、物体の位置の変化のこと[1]。
変位の対象は、古典力学での質点の位置であったり、結晶︵固体、あるいは結晶表面やそれに吸着した原子、分子など︶での原子の位置︵原子変位︶であったりする。
表記は、変位の大きさに着目する x, dのような場合や、変化した前後の位置の差であるという点に注目する Δr という場合がある。
物理量としての変位はベクトルで使うことが多く、変位ベクトルと呼ばれる。
物体の位置を表現するには原点からの位置ベクトルを使う方法もある。どこかに基準点を定めるということでは変位もあまり違わないが、局所的な現象を表すときには基準位置とそこからの変位で記述したほうが簡単になることもある。
変位x と位置ベクトルr は次の式で変換できる。
 ここでr0 は基準点の位置ベクトルである。
ここでr0 は基準点の位置ベクトルである。
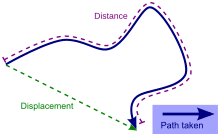 移動距離︵distance︶と変位︵displacement︶の違い。
ばねに繋いだ物体の運動では、物体の位置は、ばねの自然長の位置を基準とした変位で表すのが便利である。
移動距離︵distance︶と変位︵displacement︶の違い。
ばねに繋いだ物体の運動では、物体の位置は、ばねの自然長の位置を基準とした変位で表すのが便利である。
このとき物体の位置エネルギーは、次のような式で表せる。
 ここで xは、ばねの自然長の位置を基準とした変位、k はばね定数である。
ここで xは、ばねの自然長の位置を基準とした変位、k はばね定数である。
物体にかかる重力は基準位置︵とエネルギーの基準点︶を動かすだけだから、ばねがどんな方向を向いていても、また重力がかかっているときでもこの式は変更する必要がない。このようにばねの運動では変位を含む部分が本質的といえる。
連続体力学における変位[編集]
 Figure 1. Motion of a continuum body.
連続体力学においては、変位とは物質点の位置の変化である。変位には、剛体変位と変形という二つの要素がある。剛体変位は、形状や大きさの変化を伴わない、物体の平行移動や回転である。連続体の変位後に物質点間に相対変位がある場合、変形が生じている。一方、物質点間に相対変位がない場合、変形は生じておらず、剛体変位が生じたと言える。
Figure 1. Motion of a continuum body.
連続体力学においては、変位とは物質点の位置の変化である。変位には、剛体変位と変形という二つの要素がある。剛体変位は、形状や大きさの変化を伴わない、物体の平行移動や回転である。連続体の変位後に物質点間に相対変位がある場合、変形が生じている。一方、物質点間に相対変位がない場合、変形は生じておらず、剛体変位が生じたと言える。
連続体の変位の記述において、変位前の状態を基準配置、変位後の状態を現在配置と呼ぶ。ここで配置とは、物体の全ての物質点の位置から構成される集合である。
変位ベクトル[編集]
変位の記述には二つの方法がある。一つは物質表示やラグランジュ表示と呼ばれ、基準配置における位置ベクトル Xを用いて物理量を表す方法である。物質表示の際に参照される座標系を物質座標系と呼ぶ。もう一つは、空間表示やオイラー表示と呼ばれ、現在配置における位置ベクトル xを用いて物理量を表す方法である。空間表示の際に参照される座標系を空間座標系と呼ぶ。連続体力学#連続体の記述方法も参照のこと。
基準配置と現在配置における物質点Pの位置を関連付けるベクトルを変位ベクトルと呼び、物質表示では  、空間表示では
、空間表示では  と記述される。
と記述される。
変位場は物体の全ての物質点、全ての変位ベクトルのベクトル場であり、基準配置と現在配置を関連付ける。一般に、変位場は物質表示によって以下のように記述される。
 または、
または、  また、空間表示では以下のようになる。
また、空間表示では以下のようになる。
 または、
または、  ここで、
ここで、  は、物質座標系の基底
は、物質座標系の基底  と空間座標系の基底
と空間座標系の基底  の方向余弦であり、以下の関係が成り立つ。
の方向余弦であり、以下の関係が成り立つ。
 また、
また、 と
と  の関係は以下のようになる。
の関係は以下のようになる。
 または、
または、  また、以下の関係が成り立つ。
また、以下の関係が成り立つ。


 の場合、物質座標系と空間座標系を組み合わせることが一般的であり、それぞれの基底の方向余弦はクロネッカーのデルタとなる。
の場合、物質座標系と空間座標系を組み合わせることが一般的であり、それぞれの基底の方向余弦はクロネッカーのデルタとなる。
 以上より、物質座標系において以下の式が得られる。
以上より、物質座標系において以下の式が得られる。
 または、
または、  また、空間座標系では以下のようになる。
また、空間座標系では以下のようになる。
 または、
または、 
変位勾配テンソル[編集]
物質表示の変位ベクトル
 を物質座標X で偏微分して得られるテンソルは、物質変位勾配テンソル ∇X uまたは単に変位勾配テンソル[2]と呼ばれる。
を物質座標X で偏微分して得られるテンソルは、物質変位勾配テンソル ∇X uまたは単に変位勾配テンソル[2]と呼ばれる。
 または、
または、
 ここで、F は変形勾配テンソル、I は恒等テンソルである。
ここで、F は変形勾配テンソル、I は恒等テンソルである。
同様に、空間表示の変位ベクトル
 を空間座標で偏微分して得られるテンソルは、空間変位勾配テンソル ∇x Uと呼ばれる。
を空間座標で偏微分して得られるテンソルは、空間変位勾配テンソル ∇x Uと呼ばれる。
 または、
または、

変位勾配テンソルとひずみテンソルの関係[編集]
変位勾配テンソルには性質の異なる2つの内容が含まれる。[3][4]
 変位勾配テンソルの対称成分εはひずみと呼ばれ、形状の変化の程度をあらわす量である。一方、反対称成分ωは物体が形状を変化させずに単に回転することを表す。
変位勾配テンソルの対称成分εはひずみと呼ばれ、形状の変化の程度をあらわす量である。一方、反対称成分ωは物体が形状を変化させずに単に回転することを表す。
参考文献[編集]
 | 出典は列挙するだけでなく、脚注などを用いてどの記述の情報源であるかを明記してください。記事の信頼性向上にご協力をお願いいたします。(2014年1月) |
- Dill, Ellis Harold (2006). Continuum Mechanics: Elasticity, Plasticity, Viscoelasticity. Germany: CRC Press. ISBN 0-8493-9779-0. https://books.google.co.jp/books?id=Nn4kztfbR3AC&redir_esc=y&hl=ja
- Hutter, Kolumban; Klaus Jöhnk (2004). Continuum Methods of Physical Modeling. Germany: Springer. ISBN 3-540-20619-1. https://books.google.ca/books?id=B-dxx724YD4C&hl=en
- Lubarda, Vlado A. (2001). Elastoplasticity Theory. CRC Press. ISBN 0-8493-1138-1. https://books.google.ca/books?id=1P0LybL4oAgC&hl=en
- Macosko, C. W. (1994). Rheology: principles, measurement and applications. VCH Publishers. ISBN 1-56081-579-5
- Mase, George E. (1970). Continuum Mechanics. McGraw-Hill Professional. ISBN 0-07-040663-4. https://books.google.co.jp/books?id=bAdg6yxC0xUC&redir_esc=y&hl=ja
- Mase, G. Thomas; George E. Mase (1999). Continuum Mechanics for Engineers (Second ed.). CRC Press. ISBN 0-8493-1855-6. https://books.google.co.jp/books?id=uI1ll0A8B_UC&redir_esc=y&hl=ja
- Nemat-Nasser, Sia (2006). Plasticity: A Treatise on Finite Deformation of Heterogeneous Inelastic Materials. Cambridge: Cambridge University Press. ISBN 0-521-83979-3. https://books.google.ca/books?id=5nO78Rt0BtMC&hl=en



